Publicitate
Mașinile cu telecomandă sunt distractive, sigur, dar Auto-conducere mașinile robotizate sunt și mai distractive. În acest tutorial, vom construi un robot pe patru roți care să poată conduce și să evite obstacolele. Am cumpărat acest kit complet 4WD de la AliExpress, dar puteți cumpăra cu ușurință majoritatea acestor componente de la un magazin de electronice și le puteți pune împreună.
Vă recomand să citiți toate instrucțiunile înainte de a începe, deoarece acestea vor clarifica unele lucruri care ar putea fi confuze la prima dată. De asemenea, acesta poate părea un proiect foarte lung și avansat, datorită lungimii instrucțiunilor, dar este de fapt destul de simplu. Nu trebuie să vă intimidați - acesta este un proiect la nivel de începător cu care puteți obține rezultate satisfăcătoare, apoi puteți construi pe măsură ce aflați mai multe. Nu-ți place acest stil de robot? Iată câteva altele Roboti Arduino 8 roboți Arduino pe care îi puteți construi pentru mai puțin de 125 $Arduino poate face multe, dar știai că poate crea roboți cu drepturi depline? La fel de ieftin, de asemenea! Citeste mai mult ai putea construi cu ușurință în schimb.
Iată ce avem, după ce am scos totul din ambalaj:

Pentru a începe, vom atasa motoarele și puntea H (placa care oferă putere motoarelor) la partea inferioară a șasiuului. În primul rând, atașați cele patru suporturi metalice (sunt dreptunghiulare, blocuri metalice găurite) la fiecare motor folosind două șuruburi lungi și două piulițe.

Va trebui să vă asigurați că sunt atașate corect, așa că consultați imaginea de mai jos pentru a vă asigura că partea blocului cu două găuri găurite va fi orientată în jos. Rețineți că firele de pe fiecare motor sunt îndreptate spre centrul șasiului.

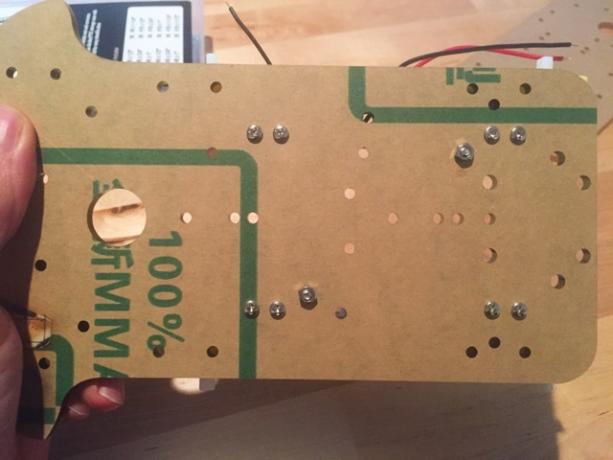
Acum fiecare motor poate fi atașat pe șasiu folosind două șuruburi scurte în partea de jos a fiecărei brațe metalice. Iată o vedere a părții de jos a șasiului, astfel încât să puteți vedea unde trebuie să fie șuruburile:

Următorul pas este să asigurați podul H (care este tabloul roșu, în kitul meu) de șasiu. Poate doriți să așteptați până când toate firele sunt atașate la podul H înainte de a face acest lucru, dar asta depinde de dvs. (mi s-a părut mai ușor). O notă rapidă: trusoul meu lipsește o serie de elemente de fixare, așa că am folosit bandă electrică pentru a asigura podul. Cu toate acestea, puteți vedea aici unde s-ar fi dus șuruburile și piulițele:
Acum că puntea H a fost atașată, puteți începe să conectați sursa de alimentare. Deoarece suportul bateriei cu șase AA este dotat cu un adaptor continuu, va trebui să tăiați capătul (așa cum am făcut eu) sau să conectați firele jumper la bateriile în sine.

Indiferent cum decideți să o faceți, veți rula cablul pozitiv către portul etichetat „VMS” și firul negativ către unul etichetat „GND” de pe pod. Înșurubați elementele de fixare și asigurați-vă că sunt sigure. Apoi, veți conecta firele motorului. De ambele părți, există un set de două porturi; unul este etichetat „MOTORA”, iar celălalt „MOTORB”. Ambii firele roșii din fiecare parte vor intra în portul verde cel mai central și ambele fire negre vor merge în exterior. Această imagine ar trebui să clarifice:

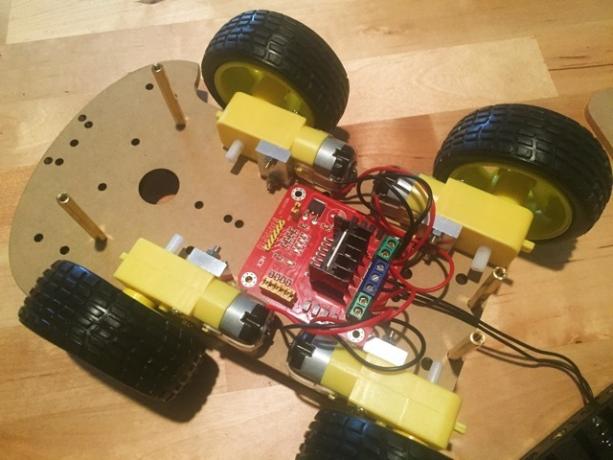
Am descoperit că trebuie să desprind o parte din carcasă de pe firele motorului pentru ca acest lucru să funcționeze. Acum că aveți motoarele și sursa de alimentare toate conectate, glisați roțile pe arbori de acționare a motorului și atașați cei patru arbori de cupru în locațiile prezentate în imaginea de mai jos (fiecare arbore de cupru are nevoie de un șurub mic). Acest robot începe să ia formă!
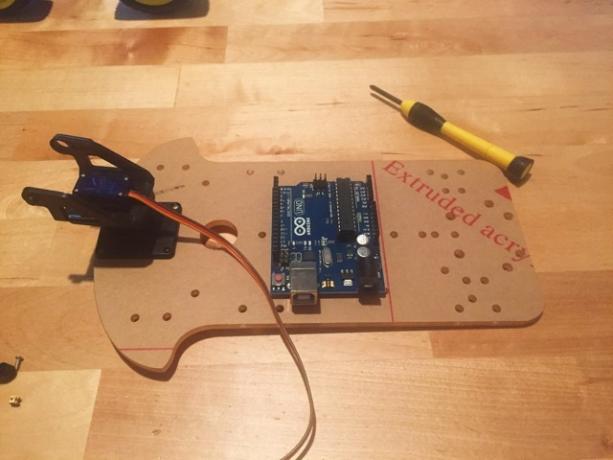
Acum, pune acea parte a șasiului deoparte și apucă-l pe celălalt care se va așeza deasupra. Următorul pas este să atașați Arduino - din nou, a trebuit să folosesc bandă electrică, dar ar trebui să vă puteți asigura mai bine cu alți șuruburi și piulițe.

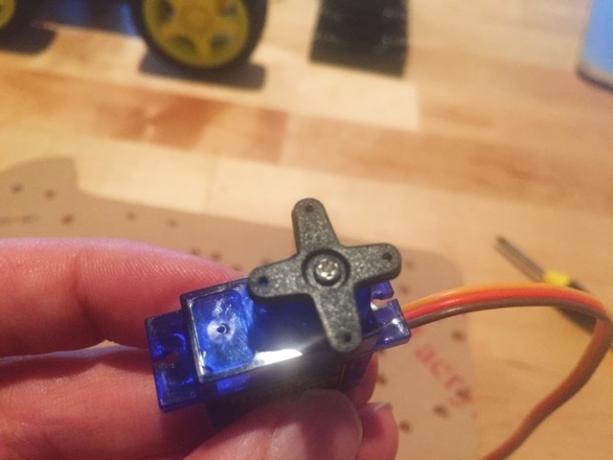
Următorul pas necesită micro-servo, traversa neagră, suportul servo (care constă din trei bucăți de plastic negru) și câteva șuruburi mici. Utilizați unul dintre șuruburile ascuțite mai mari din kit pentru a atașa crucea neagră la micro servo:
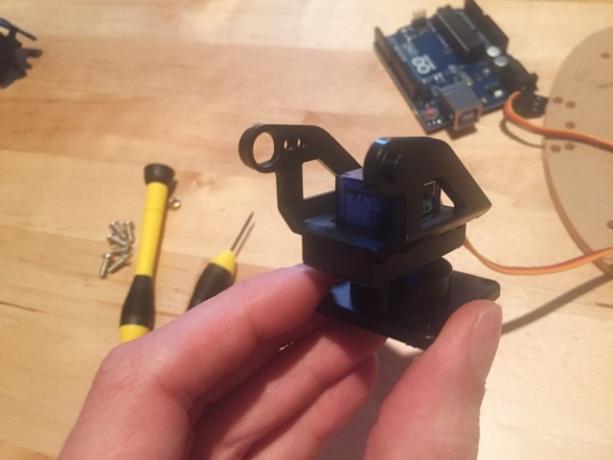
Apoi rotiți servo în sus în inelul de plastic negru al suportului. Asigurați-vă că cablurile care ies din servo sunt orientate în aceeași direcție cu partea mai lungă a suportului (din nou, a se vedea imaginea de mai jos) și folosiți patru șuruburi minuscule pentru a fixa traversa (există patru găuri în suport care se aliniază cu orificiile de pe bara transversală).

Iată cum arată după ce este atașat:

În cele din urmă, luați celelalte două bucăți ale suportului servo și fixați-le pe servo (există caneluri în piesele laterale care se potrivesc cu fila din plastic a servo).
Acum că suportul servo este complet, poate fi montat pe șasiu.
Iată unde merg șuruburile:

Este timpul să aruncăm ochii robotului nostru. Atașați senzorul cu ultrasunete la suportul servo folosind două legături cu fermoar.

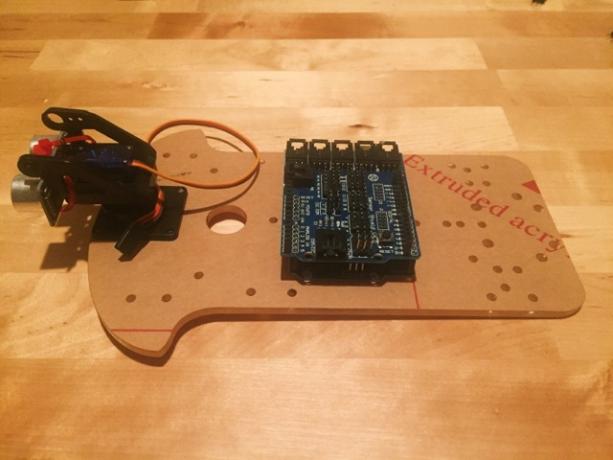
Dacă lucrați din același kit ca și mine, veți primi un scut senzor Arduino. Nu o vom folosi în această construcție, dar o puteți deschide în partea de sus a UNO acum dacă doriți (așa cum am în imaginea de mai jos). Trebuie doar să aliniați pinii de pe fundul scutului cu porturile I / O de pe Arduino și apăsați în jos pentru a le conecta. Nu aveți nevoie de el în acest moment, dar scuturile pot veni la îndemână Cele mai bune 4 scuturi Arduino pentru a-ți potența proiecteleAți cumpărat un kit de pornire Arduino, ați urmat toate ghidurile de bază, dar acum ați lovit un blocaj - aveți nevoie de mai mulți biți și bobițe pentru a vă realiza visul electronic. Din fericire, dacă ai ... Citeste mai mult .
Indiferent dacă conectați sau nu un ecran de senzori, acum veți avea nevoie de patru fire pentru a conecta senzorul cu ultrasunete la Arduino. Există patru pini pe senzor, VCC, GND, TRIG și ECHO. Conectați VCC la pinul 5V de pe Arduino, GND la GND și TRIG și ECHO la pinii I / O 12 și 13.
Acum apucați partea inferioară a șasiului și conectați șase fire jumper la pinii I / O ai podului H (sunt marcați ENA, IN1, IN2, IN3, IN4 și ENB). Rețineți ce fire de culoare sunt conectate la ce porturi, după cum va trebui să știți mai târziu.

Acum este timpul să începeți să puneți acest lucru împreună. Prindeți partea superioară a șasiului și așezați-o pe partea superioară a arborilor de cupru conectați la partea inferioară și trageți firele atașate la puntea H prin orificiul din centrul șasiului. Conectați cele șase fire la porturile I / O după cum urmează:
- ENA către portul I / O 11
- ENB către portul I / O 10
- A1 până la portul I / O 5
- Portul A2 până la I / O 6
- Portul B1 la I / O 4
- Portul B2 către I / O 3

Acum, utilizați patru șuruburi scurte pentru a fixa partea superioară a șasiuului la arbori de cupru. Setați suportul bateriei cu șase AA pe partea superioară a șasiuului (înșurubați-l dacă puteți), atașați suportul pentru celule de 9V la Arduino și acest bot este gata să se pună în mișcare!

Ei bine, aproape gata de rock. Încă nu are o personalitate suficientă.
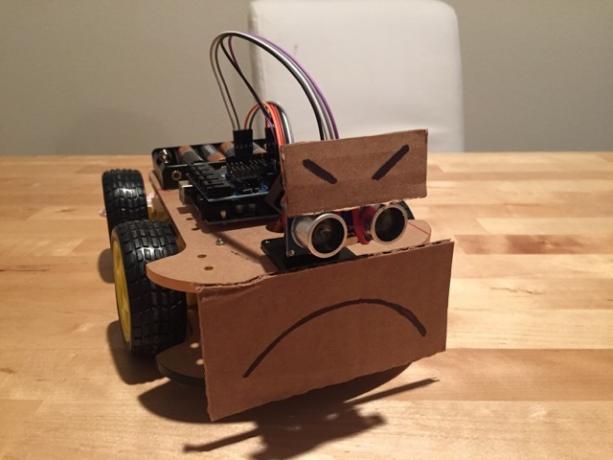
Acolo mergem. Acum să-i dai un creier. Să facem ceva programare.
Primul lucru pe care îl vom face este să testăm pentru a ne asigura că podul și motoarele sunt conectate corect. Iată o schiță rapidă asta va spune bot-ului să înainteze timp de o jumătate de secundă, să conducă înapoi timp de o jumătate de secundă, apoi să se întoarcă la stânga și la dreapta:
Acesta este o mulțime de coduri pentru un test simplu, dar definirea tuturor acestor funcții simplifică modificarea ulterioară. (Mulțumiri mari lui Billwaa pentru a sa postare pe blog despre utilizarea H-bridge pentru definirea acestor funcții.) Dacă ceva nu a funcționat corect, verificați toate conexiunile dvs. și dacă firele sunt conectate la pinii corecți. Dacă totul a funcționat, este timpul să treceți la testul senzorului. Pentru a utiliza senzorul cu ultrasunete, veți dori descărcați biblioteca NewPing, apoi folosiți Schițare> Include bibliotecă> Adăugare bibliotecă .ZIP ... pentru a încărca biblioteca.

Asigurați-vă că vedeți declarația include în partea de sus a schiței; dacă nu, lovește Sketch> Include Library> NewPing. După ce ați făcut asta, încărcați următoarea schiță:
Încărcați schița și deschideți monitorul serial utilizând Instrumente> Serial Monitor. Ar trebui să vedeți o secvență de actualizare rapidă a numerelor. Țineți mâna în fața senzorului și vedeți dacă se schimbă acest număr. Mutați mâna înăuntru și în afară și ar trebui să obțineți o măsurare a distanței cât de îndepărtată este de senzor.

Dacă totul a funcționat corect, este timpul să o punem la capăt și să lăsăm acest lucru să funcționeze! Iată codul robotului acum. După cum probabil vă puteți da seama, aceasta este, practic, cele două schițe de test, alături de o declarație adăugată dacă controlează comportamentul robotului. I-am dat un comportament foarte simplu de evitare a obstacolelor: dacă detectează ceva mai puțin de patru centimetri distanță, se va face backup, se va întoarce la stânga și va începe să se miște din nou. Iată un videoclip cu botul în acțiune.
Dă-i Robotului ceva viață
După ce ați obținut acest comportament funcțional corect, puteți adăuga un comportament mai complex; faceți robotul să alterneze între rotirea la stânga și la dreapta sau să aleagă la întâmplare; sună un sunet dacă se apropie de ceva; întoarceți-vă, în loc să faceți o copie de rezervă; ești într-adevăr limitat doar de imaginația ta. Ați putea folosi aproape orice din dvs. Trusa de pornire Arduino Ce este în kit-ul dvs. Arduino Starter? [Începători Arduino]Față de o cutie plină de componente electronice, este ușor să fii copleșit. Iată un ghid pentru exact ce veți găsi în trusa dvs. Citeste mai mult pentru a adăuga mai multe funcționalități. Veți observa, de asemenea, că încă nu am codificat nimic pentru serviciu: puteți face efectiv „ochii” robotului dvs. să se miște înainte și înapoi. poate folosindu-le pentru a căuta o cale în loc de a face o copie de rezervă ori de câte ori găsește un obstacol direct în față.
Spuneți-ne dacă decideți să construiți acest robot sau altul și spuneți-ne cum decideți să personalizați comportamentul sau aspectul acestuia. Dacă aveți întrebări despre acest robot, postați-le în comentariile de mai jos și voi vedea dacă pot ajuta!
Dann este un consultant în strategie de conținut și marketing care ajută companiile să genereze cerere și clienți. De asemenea, bloguri despre strategie și marketing de conținut pe dannalbright.com.